
直驱与绳驱不再二选一。
“灵巧手不再只是末端执行器,它是一个系统组件,同时连着感知、决策、控制——任何一层没接好,整个链路都跑不动。”临界点CTO熊坤的观点,精准点出了灵巧手的核心定位。

当前业界在灵巧手研发上,似乎逐渐收敛为直驱与绳驱两大主流路线,二者各有优劣,逐渐成为行业选择的“二选一”命题。
01.
灵巧手的方案“收敛”?
直驱路线以电机直接驱动关节为核心,凭借电机驱动器的小型化突破,近一两年才逐步走向成熟。
其优势十分突出,响应速度快、控制精度高、力反馈直接,且可在每个关节排布驱动器,轻松实现高自由度设计,控制逻辑相对简单,适配高精准度作业需求。
但短板也同样明显,微型化电机需搭配高强度金属结构,导致灵巧手普遍重达一公斤以上,且高减速比带来传动透明性差、零部件精密易损等问题,同时成本也相对偏高。
Sharpa公司的SharpaWave是直驱方案的标杆产品,于2025年10月正式量产,被誉为「灵巧手界的劳斯莱斯」。
该产品拥有22个主动自由度,与人手尺寸高度同构,细分配置包含15个弯曲伸展自由度、6个侧向移动自由度和1个内旋自由度,可灵活适配不同物体抓取与手内操作。

其指尖输出力超20N,手势频率达4Hz以上,搭载的动态触觉阵列让感知能力贴近人类,可完成多种精细任务,且通过100万次握持无故障认证。
尽管单只重量1200g、售价5万美元存在短板,但仍获得国内外顶级科技公司青睐。
绳驱路线则将电机外置,通过类肌腱拉绳驱动手指,能让手本体更轻便灵活,动作更接近人类,在复杂非结构化场景中更具优势,但绳索的弹性、回差与磨损会加大控制难度。
目前,主流绳驱方案分为双向与单向拉绳两类,各有侧重。
双向拉绳以Shadow Hand为代表,其产品定价15万美元,拥有26个自由度,每个关节配备两根拉绳实现屈伸,但拉绳蠕变易导致松动,影响控制精度。

因此,苏黎世理工的开源ORCA Hand通过棘轮机构解决拉绳张紧问题,却仍需定期手动调整。


单向拉绳以特斯拉灵巧手为典型,对蠕变敏感度低,可通过算法优化精度,但关节伸直依赖弹簧复位,会损耗抓握力。
前不久,特斯拉第三代灵巧手的5项专利公开,涵盖灵巧手整体、前臂、手腕、手指及缆线布设等方面。
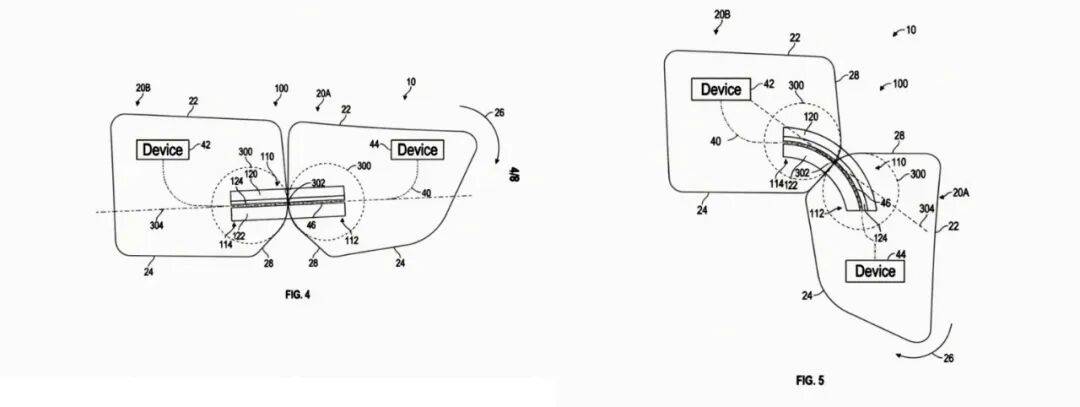
其中,手指设计专利核心创新为采用 “复合柔性韧带” 替代传统手指铰链,该连接件为三明治结构,两层硅胶层可提供弹性与被动回弹力矩,中间增强层拉伸强度要求超 895MPa,能提升拉伸刚度并防止指节错位扭转,整体设计仿生人类手部且采用梯度化工程理念。

不过,马斯克随后针对该专利直言:“我们已经修改了设计。这个设计实际上行不通。”
此外,高自由度绳驱灵巧手还存在空间利用率偏低的共性问题。
拉绳虽体积小,但绳驱走线需兼顾布局与关节运动时的动态长度变化,不同于齿轮传动可紧密排布电机,其驱动器大多无法全部集成在手掌内部,往往需要向手腕下方延伸。
整体而言,直驱与绳驱路线各有侧重、互有短板,当前业界研发已向这两条路线集中。
02.
直驱与绳驱,临界点“全都要”
过去,行业始终面临技术路线“二选一”的困境,而临界点通过双向布局实现的突破,正逐步打破这一路线壁垒。
在行业技术路线不断收敛的背景下,临界点并未局限于单一路线,而是选择直驱与绳驱并行探索,其旗舰绳驱灵巧手 OmniHand 3 Ultra-T 顺势硬核登场,成为该布局下的重要成果。
在灵活性方面,作为承担作业任务的核心部件,灵巧手的能力上限直接决定了整个系统的作业水平。
OmniHand 3 Ultra-T 采用22+3自由度仿生构型,其中拇指设计为4主动自由度,可实现复杂对位与握姿控制,且满分通过卡潘吉(Kapandji)对指测试;手掌设置1主动自由度,有效增强了In-hand Manipulation操作能力。

Kapandji对指测试要求拇指依次触碰手掌不同位置,从食指指尖延伸至小指根部,最终完成接近手掌底部的极限对指动作,测试分数越高,表明手部空间协调性、灵活性越接近真实人手。
此次获得满分,意味着该灵巧手不仅能够实现物体抓取,更可覆盖人手所有关键对指动作,灵活性能达到行业顶尖水平。
而灵活性的核心不仅在于操作能力的覆盖,更在于操作效率的提升。
OmniHand 3 Ultra-T 可实现0.3秒极速开合,能够精准复刻人手级精细操作,完美适配工业产线的高速作业节拍,进一步释放生产效率。
除了卓越的灵活性,OmniHand 3 Ultra-T 还具备突出的超仿人特性。
其骨架采用镁合金替代传统铝合金,实现极致减重,同时在应力集中点采用钛合金进行强化,在同自由度产品中实现全球最轻,手部自重不超过500g,是目前同自由度(22+3)产品中全球最轻的量产方案。
在手腕设计上,该灵巧手的腕部可实现前后55°、左右40°的运动弧度,远超行业普遍不足30°的水平,大幅提升了手部运动范围,能够灵活适配狭窄空间、斜向操作等复杂工况,拓宽了应用场景边界。

在负载能力上,OmniHand 3 Ultra-T 搭配自研行星滚柱丝杠微型电缸,额定输出力可达300N,负载自重比高达10:1,打破了绳驱手“轻量难重载”的固有局限。
同时,其单根腱绳的破断力达到1000N,兼具柔顺性与高抗冲击性。
而在可靠性方面,即便是腱绳出现磨损、断裂等不可避免的状况,OmniHand 3 Ultra-T 创新性地采用腱绳快拆易换设计,将单根腱绳的更换时间压缩至10分钟以内。

对比行业内同类产品,如特斯拉第二代灵巧手,其单台成本高达6000美元,且负载能力不足,一旦出现故障便近乎报废。
而OmniHand 3 Ultra-T 的腱绳快拆设计,有效解决了传统绳驱手运维需整机拆解、停机时间长的核心难题,为产线7×24小时连续运行提供了关键保障。
感知层面,OmniHand 3 Ultra-T 搭载视触融合的超强感知系统,在行业内率先实现全手分布三维触觉感知。

同时,标配掌内相机,可原生承接手部第一视角数据,有效补齐机器人本体视觉盲区,能够实现对异形、易碎、软质物料的稳定精准抓取。
作为临界点在直驱、绳驱双技术路线上的重要落子,OmniHand 3 Ultra-T 在产品设计层面实现了多项首创性创新。
其一,首创绳驱主导、混合直驱的驱动方式。
换而言之,该产品以绳驱为主,同时引入关键部位的直驱能力,形成混合驱动结构。
这这种设计,既保留绳驱轻量化、高灵活特性,又大幅提升了手指侧摆力、控制精度与长期可维护性,同时对仿人结构、整机重量及成本实现了精准管控。
不过,产品实际的长期运行表现,仍需通过真机实测数据来进一步验证。
其二,首创内置张紧机构。
绳驱结构长期使用易松弛、精度衰减,是行业普遍难题。
基于此,临界点首创内置张紧机构,搭配定制化结构紧固方式与材料的特殊设计,有效抑制了腱绳蠕变与绳头端部冲击,大幅提升了产品长期运行的精度保持性。
其三,自研的行星滚柱丝杠微型电缸与低摩擦绳轮涂层。
OmniHand 3 Ultra-T 采用自研的行星滚柱丝杠微型电缸与低摩擦绳轮涂层,在保障300N额定输出力的同时,实现了极致的空间利用率,同时降低了传动磨损,进一步延长了核心部件的使用寿命,为产品长期稳定运行提供了有力支撑。
OmniHand 3 Ultra-T 的发布,是临界点在绳驱路线上的一次重要突破,它用实际产品证明,绳驱灵巧手无需在灵活性与可靠性之间做出妥协,为行业技术发展提供了新的思路与方向。
03.
让每个机器人都用上灵巧手
除了OmniHand 3 Ultra-T这款追求性能极限的产品外,临界点瞄准人形机器人“砍手保稳定”的行业痛点,也推出了聚焦技术普惠的OmniHand 3 Lite灵巧手。
作为目前全球最小量产灵巧手,其尺寸仅相当于鼠标大小,采用了航空级金属材料外壳和表面硅胶一体成型的方案设计。

通过整机摆锤冲击、整机自由跌落、水平碰撞等多项严苛冲击测试,可支持人形机器人完成手撑地、侧手翻等激烈运动,是0.8-1.3米半尺寸人形机器人的理想搭配。
该产品通过精巧结构设计优化成本、简化生产流程,预计2026年Q2量产交付。
开源版本价格有望控制在300美金以内,同时支持选配鱼眼相机、全域触觉覆盖,深度适配Dex-UMI数采装置,实现“小巧不减配”。
OmniHand 3 Lite推出的核心目标,是推动灵巧手从万级市场进入十万级市场,通过开源+社区生态模式,让具身智能探索走进高校、中小学等更多场景。
除了灵巧手产品,临界点还针对工业场景的刚需,推出标杆级具身夹爪OmniPicker 3,解决工业场景中可靠夹取、快速开合、高强度使用的核心需求。

这款产品在经典款基础上全面焕新,采用高强度合金材料,抗冲击、抗震动性能升级,支持100万次带载开合,夹持力达140N,开合速度快至0.4s。
同时,新增触觉感知功能,支持0.1N微小力控,可实现“鸡蛋与钢件通吃”,适配精密装配等复杂场景。
OmniPicker 3支持自定义模块化夹趾,提升夹持成功率与泛化性;配套研发同构UMI设备,实现训练数据无映射迁移,提升数据准确性与训练效率。
04.
写在最后
灵巧手之所以难以适配形态、环境多变的复杂抓取场景,核心问题在于数据的数量与覆盖范围均存在不足。
此外,相较于海量数据,高质量数据对模型效率和泛化能力的影响更为关键。而灵巧手本身的数据采集难度,也要远高于其他类型机器人。
视触觉也许是破解这一数据匮乏难题的核心技术方向之一。
相比其他触觉传感器方案,该路线的优势在于触觉信息以视频流形式呈现,与视觉数据同源,能完美适配端到端大模型训练。
而临界点推出的 OmniHand 3 Ultra-T 便搭载了这类视触融合的高性能感知系统。
与之对应的,截至目前,临界点已向市场交付超 8000 台灵巧手与上万台夹爪,其中近千台设备在国内多家数据采集工厂投入使用,覆盖零售仓、超市、药房、工厂等复杂场景,可实现 8 小时连续稳定作业。
这些一线运行的灵巧手已积累超 5 万小时真实工况操作数据,涵盖极端光照、特殊材料非线性滑移、复杂工业电磁干扰等实验室难以复刻的极端场景,通过正向迭代闭环,为算法持续优化提供了核心养料。

此外,本次全新发布的 Omni 家族全系产品,不仅统一了软硬件接口标准,还采用全栈开源架构,开发层面原生支持强化学习训练,同时兼容 ROS/ROS2、NVIDIA Isaac Gym、Mujoco 等主流框架,并非仅能配套使用的专属硬件,而是可直接接入现有研发体系的通用化组件。












 沪公网安备31010702008139
沪公网安备31010702008139