
MoDE-VLA 让机器人更懂 “精细操作”。
马斯克曾直言,人形机器人一半以上的工程难度集中在“造手”上。
这一断言,道破了机器人灵巧操作的行业痛点:高自由度力控与精准触觉感知的结合,堪称光机电设计的终极挑战。
而在2026年的春晚舞台上,一双能灵活盘核桃的机器手惊艳全场,让长期低调深耕的Sharpa Robotics走进公众视野。
这家由禾赛科技三位核心创始人二次创业打造的企业,正以灵巧手为基石、机器人本体为载体、AI 模型为核心,持续解锁机器人双手协同的全新可能。
01.
MoDE-VLA,解锁灵巧手“削苹果”操作
对人类而言,削苹果只是清晨再平常不过的小事,但对机器人来说,这却是双手协同操作的「终极关卡」。
完成这一动作,需要一只手稳定抓握并旋转苹果,另一只手精准控制刀具力度 ,全程还要持续处理触觉反馈,避免苹果滑落或刀刃切入过深。

近期,Sharpa发布的研究成果填补了这一技术空白。该公司将全新的 MoDE-VLA 人工智能架构与共享自主「copilot」系统相结合,展示了其宣称的业内首个自主双灵巧手苹果削皮完整序列。
NE时代智能体 ,赞8训练机器人实现类人操作的核心难题的是数据。
即便专业操作员,控制搭载两只SharpaWave灵巧手、拥有63个自由度的SharpaNorth机器人,认知负荷也极为繁重。
为此,Sharpa推出IMCopilot(In-hand Manipulation Copilot),在数据采集阶段采用共享自主模式:人类操作员通过外骨骼控制机器人手臂的“粗略”运动,再通过脚踏板将“精细”的手部旋转操作交由AI完成。

基于此,结合外骨骼遥操作与沉浸式VR反馈,这种混合方案让 Sharpa 得以采集传统遥操作无法实现的高保真演示数据,
同时,这也标志着自去年 Sharpa 首次交付硬件以来,这是一次重要的技术演进:研发重心从单纯的机械参数,转向驱动硬件所需的软件智能。
数据采集完成后,机器人由MoDE-VLA(灵巧专家混合视觉-语言-动作模型)控制。

标准 VLA 模型若简单将力觉、触觉数据「拼接」到视觉输入中,往往效果不佳,因为这些模态数据的时间尺度与物理意义各不相同。
Sharpa 的解决方案是为触觉感知搭建专属「通路」。该架构核心设计包括:
稀疏MoE路由(Sparse MoE Routing):多组「专家」神经网络会根据任务阶段激活,例如刀刃接触果皮瞬间,「接触起始专家」网络会启动工作。
残差注入(Residual Injection):将接触感知修正指令「注入」机器人运动控制中,不覆盖模型预训练阶段习得的通用知识。
这一设计让机器人可以发挥量产版 SharpaWave 灵巧手的「视触觉感知」能力——该灵巧手通过内置摄像头检测指尖微小形变。
在削苹果、管道重新排列、齿轮组装、充电器插拔四项高接触复杂度任务的测试中,MoDE-VLA 平均成功率达 34%,性能较基础模型提升超一倍。

尽管削苹果任务约 30% 的成功率仍有优化空间,但削皮完成率已达 73%,这意味着即便并非每次都能完整完成任务,机器人仍可执行持续的复杂操作序列。
Sharpa 相关研究论文(arXiv:2603.08122)指出,人形机器人的未来发展方向之一是构建层级化系统:由大型视觉-语言模型负责高层「规划」,由强化学习训练的响应式专家网络负责底层「反射动作」。
随着行业逐步推进人形机器人在家庭场景落地,处理水果这类易碎、易滑、形状不规则物体的能力,仍是关键技术标杆。
上面也提及,Sharpa的灵巧操作能力,在春晚舞台上同样也得到了最直观的展现,那双灵活盘核桃的机器手,正是SharpaWave灵巧手。
盘核桃是典型的需触觉参与的动作:核桃转动时接触点与摩擦力不断变化,视觉仅能判断核桃大致位置,无法感知是否打滑、哪侧失去支撑。
而SharpaWave的精准触觉感知的能力,能让机器人实时调整手指位置与用力方向,避免核桃掉落,这也印证了其在触觉感知领域的领先优势。
02.
“富二代创业”的Sharpa
在AI浪潮席卷全球的背景下,激光雷达龙头禾赛科技的三位核心创始人——CEO李一帆、CTO向少卿、首席科学家孙恺,于2024年底开启了“二次创业”征程,Sharpa Robotics应运而生,专注于通用机器人及核心部件的研发。
与禾赛从零起步不同,Sharpa堪称“富二代创业”,却有着清醒的认知:造机器人的机遇是新能源车赛道的10倍,难度却高达100倍。
Sharpa与禾赛的关系暗藏精妙的战略设计:两家公司无股权从属关系,Sharpa独立运营,核心团队以外聘为主,现有员工超百人,三位联合创始人仅负责战略规划,精力仍聚焦禾赛。
这种架构既规避了机器人业务长周期、高投入的特性对禾赛盈利稳定性的冲击,又能充分借助禾赛在芯片、硬件制造、供应链体系的积累,为Sharpa提供坚实的AI基础设施支撑。
更深远的考量在于生态反哺,团队预判,未来机器人激光雷达市场有望超越车载领域。
Sharpa的探索将拓宽禾赛的业务边界,有望将其增长天花板提升10倍,未来禾赛也将布局机器人所需的各类零部件,不止于激光雷达。
如果说上述MoDE-VLA架构是解锁机器人灵巧操作的“软件大脑”,那么SharpaWave和North则是其强大的硬件载体。
■ 量产的直驱方案灵巧手,SharpaWave
作为Sharpa的首款产品,SharpaWave直驱传动灵巧手于2025年10月正式量产,并逐步推进客户交付工作,成为其技术落地的重要标志。

这款灵巧手采用直驱传动方案,具备22个主动自由度,每个关节可独立控制,其整体尺寸、手指手掌比例与人手高度同构,能自然适配各类模拟人手的操作场景。

在自由度细分配置上,SharpaWave包含15个弯曲与伸展自由度、6个侧向移动自由度以及1个向内旋转自由度。

相较于多数灵巧手仅能实现指关节单方向弯曲、缺乏横向移动能力的局限,6个侧向自由度可支持手指灵活展开或聚拢,适配不同大小、形状的物体,精准还原人手包覆式抓取姿态。
此外,手掌内旋自由度则强化了手内操作性能,可实现物体在手内的灵活转动,比如轻松完成闹钟旋转等动作。
在性能平衡上,SharpaWave表现突出:指尖输出力超20N,手势操作频率可达4Hz以上,既能应对高频连续操作,也能完成重载抓取,兼顾精准度与实用性。
而视触觉融合更是其核心优势,SharpaWave搭载先进的动态触觉阵列(DTA),每个指尖触觉像素超1000个,空间分辨率小于1mm,压力感知范围覆盖0-30N,灵敏度达0.005N,支持约6000级压力感知。
此外,凭借每秒180帧的数据采集速率,SharpaWave可实现实时纹理识别、六维力检测等功能,让机器人操作感知无限贴近人类水平。
目前,SharpaWave已能熟练完成发牌、拍立得使用、手持手机拍照、简易烹饪、桌面整理等多样化任务,官网展示的多物体抓取、剪刀操控、单指尖提举可乐、双手每秒4次快速张合等演示视频,充分验证了其操作灵活性。

同时,它还通过了100万次连续握持循环无故障认证,各关节支持反向驱动,具备优异的耐用性与抗碰撞能力。
当然,直驱方案也存在短板:单只手重量达1200g,轻量化有待提升;5万美元的售价在国内灵巧手市场价格下探的趋势中,竞争力略显不足。
即便如此,SharpaWave仍成为行业香饽饽,被圈内半开玩笑地称为「灵巧手界的劳斯莱斯」。
自2025年10月开售以来,国内及硅谷的绝大多数顶级科技公司、机器人公司均第一时间下单,甚至不乏大单,成为机器人灵巧操作“军备竞赛”中最重要的“弹药”。
他们深知,灵巧手不决定模型上限,却能决定哪些能力能从仿真、论文落地到真实场景。
■ North机器人,CES惊艳亮相
在SharpaWave灵巧手量产之后,Sharpa于2026年CES展会上重磅推出首款全身机器人North,搭载SharpaWave灵巧手,以轮式双臂为底盘,高度约170cm,具备从颈部到腰部、肩部到手腕的类人上肢活动范围,同时发布自研端到端、分层式VTLA精细操作模型CraftNet,刷新机器人操作天花板。

展会上,North展示了四项AI驱动的核心操作演示,彰显其自主、长程、稳定的操作能力:
乒乓球对打可实现0.02秒反应速度,完成来球识别、轨迹预测与回击,还能打出旋转弧线球,兼顾上半身敏捷性与全身稳定性;

纸风车制作完成30余个连续操作步骤,验证长时序任务的误差控制能力;

多模态推理自主发牌实现AI自主精准抽牌、递牌;

拍立得拍照则以2毫米级精度完成相机拿取、拍摄、出片全流程。

此外,还有可与观众自拍、递送折页的迎宾机器人演示。
这些突破的核心,在于CraftNet模型的创新。
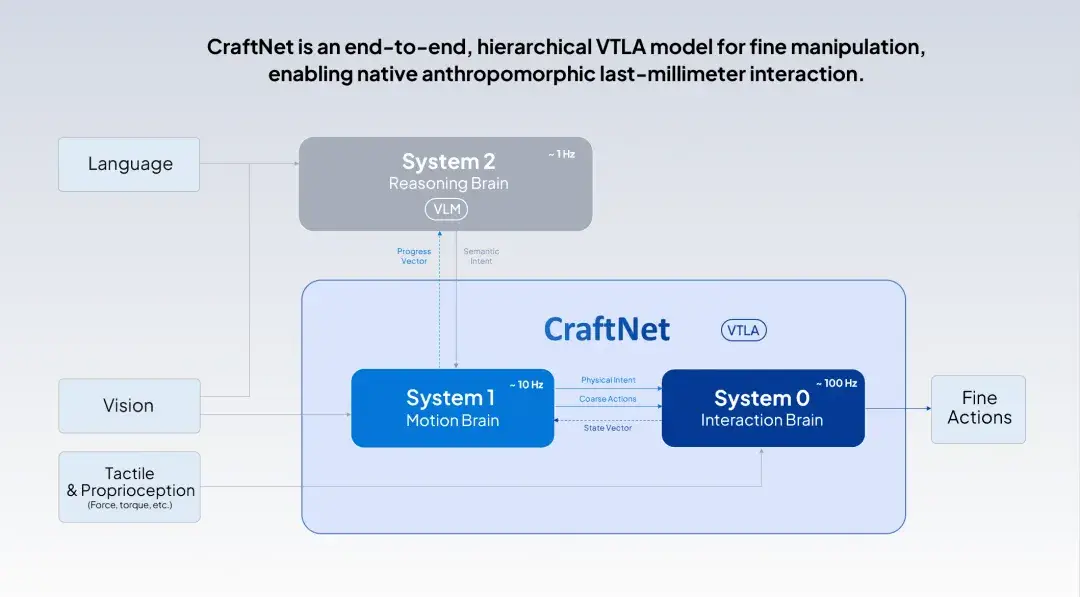
该模型在原有System 1/System 2架构基础上,首创“最后一毫米”交互控制模型System 0,构建三层异步协同系统:
System 2(推理大脑)基于开源视觉-语言模型,负责任务规划与逻辑推理;System 1(运动大脑)承担运动规划与粗略动作控制;System 0(交互大脑)作为超高频模型(运行频率约100Hz),利用触觉反馈实现精细交互控制,解决VLA模型在物理接触阶段可靠性不足的痛点,实现接近人类的操作精度。
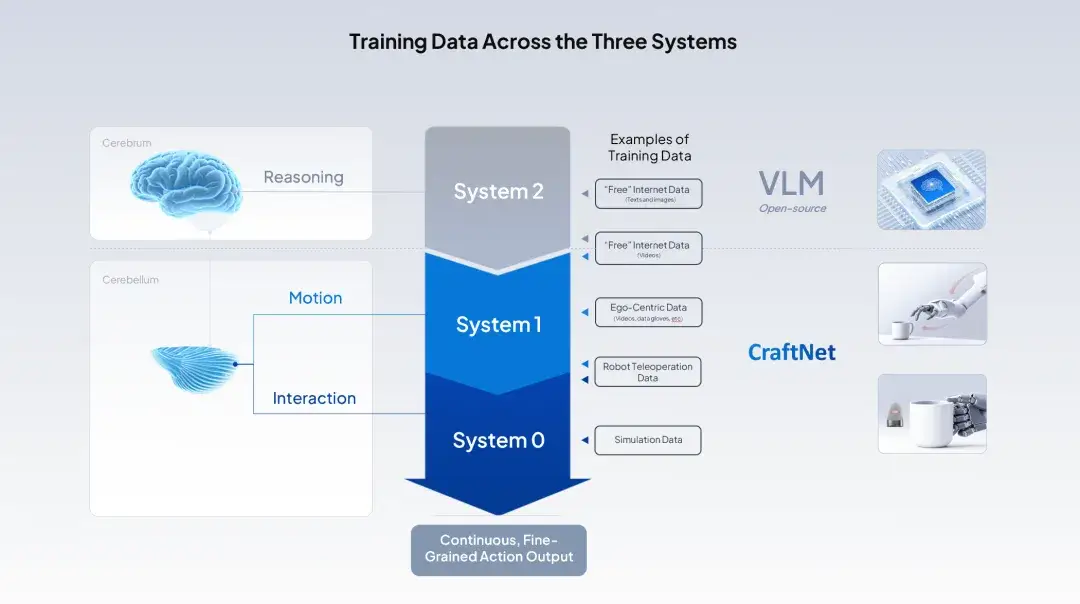
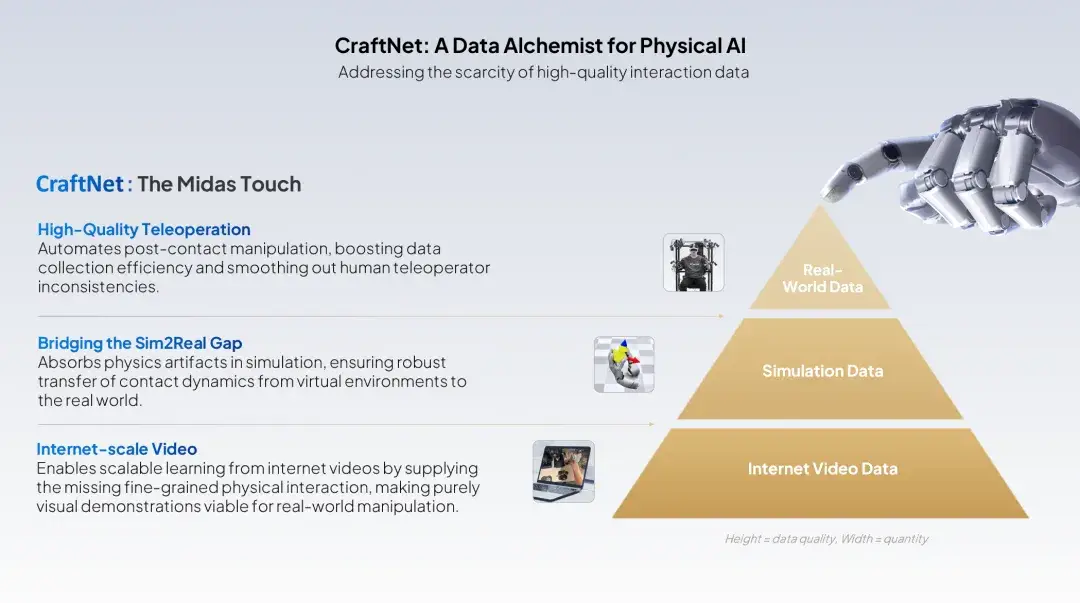
针对物理AI的数据瓶颈,CraftNet创新数据处理方案,整合真实遥操作数据、仿真数据与互联网文本图像数据,补充触觉维度,形成可持续的学习路径,推动机器人向真正的物理AI迈进。
Sharpa表示,North专为生产力导向的自主作业能力打造,通过融合高精度灵巧操作与全身协同控制,打破传统机器人在环境适配与任务执行上的局限。
03.
写在最后
过去一年,灵巧手玩家持续增加,但能同时满足自由度、尺寸、负载、可靠性与触觉能力要求并高质量交付的玩家寥寥无几,这也让长期低调的Sharpa成为行业“隐形大佬”。
在产品路线上,Sharpa锚定通用化与操作优先的核心逻辑,向少卿明确提出,机器人的核心价值在于“干活”,需以操作能力为重点,而非单纯的移动能力,通过高位可旋转视觉系统强化环境感知,打造适配多地形、多工具的通用机型。
Sharpa的发展规划清晰而务实:第一代产品聚焦科研场景,第二代切入服务领域,最终目标是将成本控制在5000美元内,大规模进入家庭市场——这一目标较马斯克提出的Optimus规模化生产后不足2万美元的预期,具备显著优势。
从禾赛的二次创业布局,到SharpaWave灵巧手的量产,再到North机器人的惊艳亮相,Sharpa以“硬件+软件”双轮驱动,破解了机器人灵巧操作的核心难题,推动视觉-语言-动作模型的迭代升级。
在人形机器人向家庭场景、生产力场景迈进的道路上,Sharpa不仅树立了灵巧操作的技术标杆,更以清晰的产品路线,为行业发展提供了可借鉴的方向,未来,随着技术的持续优化与成本的降低,这家“隐形大佬”或将重新定义通用机器人的发展格局。












 沪公网安备31010702008139
沪公网安备31010702008139