
MIT“编织肌肉”,机器人终于有了“生物级韧性”。
生物肌肉作为高效的受控力生成系统,其强度、快速响应、可扩展性与精细控制能力,长期以来都是机器人与假肢硬件研发难以逾越的标杆,工程师始终未能造出可全面接近这些特性的人工替代方案。
如今,麻省理工学院与意大利科研团队的学术突破,以及Clone Robotics的产业实践,正逐步打破这一困境,推动机器人技术向仿生化方向迈出关键一步。
01.
“编织”出来的机器人“肌肉”
来自麻省理工学院媒体实验室与意大利巴里理工大学的研究人员,开发出一种新型电流体纤维肌肉,该成果已发表于《Science Robotics》期刊,由媒体实验室博士生Ozgun Kilic Afsar、巴里理工大学教授Vito Cacucciolo及其他四位合作者共同完成。

Afsar 认为,电机虽能提供扭矩,却会构建出脆弱的机械结构,一旦电机或齿轮箱失效,机器人的整个关节通常会直接失灵,必须整体更换。而生物肌肉的运动是分布式、层级化的,依靠肌肉的层级结构实现。
借助纤维结构,该团队可以将动力编织、成束、布线,贯穿机器人全身形态,而非集中在特定关节。

这一转变让机器人实现 “渐进式失效”。就像人类的肱二头肌,由独立纤维单元构成的机器人即便损失部分纤维,也不会发生灾难性故障,只会略微降低出力,而非直接卡死。
而这种以纤维形式构建、电驱动的执行器,核心是融合了两项关键技术:
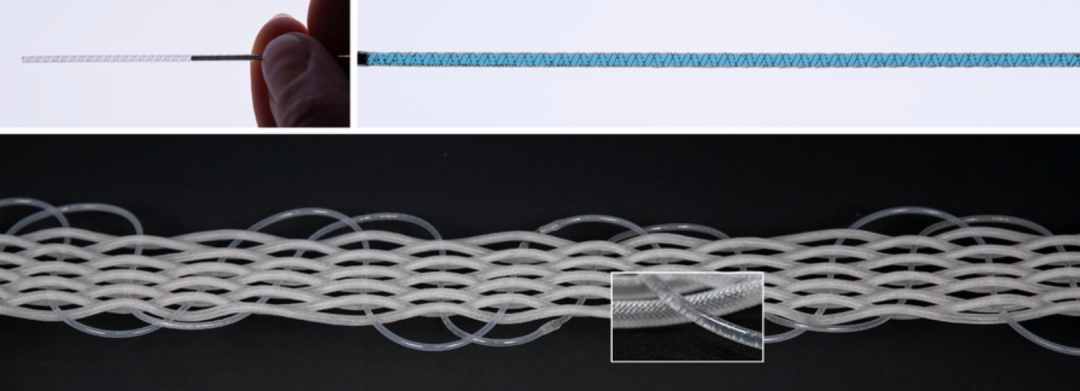
一是薄型麦基宾(McKibben)执行器,这是一种基于流体驱动的柔软粘弹性囊体,外部包裹编织加固层。加压时,囊体径向膨胀,而不可拉伸的编织层会迫使肌肉轴向收缩。
而这种结构在下文将提及的Clone Robotics打造的全尺寸骨骼肌肉人形机器人中验证了其可行性。

二是基于电流体动力学(EHD)的微型固态泵,可在密闭流体腔体中产生压力,无需运动部件或外部流体供应。
传统流体驱动软执行器依赖笨重、嘈杂的外部液压系统,难以应用于轻量化、高移动性场景,而该研究的核心突破的就是解决了这一痛点。
研究团队将毫米级、仅重数克、厚度接近牙签的EHD微型泵,与薄型麦基宾执行器集成到封闭流体回路中,采用“拮抗配置”设计,即一根肌肉收缩的同时,另一根肌肉被拉伸。

就像人体手臂弯曲时肱二头肌收缩、肱三头肌拉伸的原理,将纤维泵置于两条麦基宾执行器之间,实现一侧收缩、一侧伸展的协同运动。
这种结构不仅高度贴近生物肌肉组织方式,更消除了EHD泵对外部储液装置的依赖,实现了系统的自主闭环运行。
此外,研究团队还发现,肌肉纤维需进行预加压才能稳定工作,否则会因空化现象(泵入口压力过低产生气泡)导致介电击穿、泵体失效。
为此,他们通过施加“偏置压力”,确保泵入口压力始终高于液体蒸气压,且这一压力可根据需求调整:最佳的压力区间能实现最大收缩,提高压力则可提升响应速度,但会牺牲部分收缩能力。


这种纤维肌肉具备显著优势,不仅柔顺性好、可与人体舒适交互,还能静音工作,无需笨重辅助设备,可高密度分布于机器人或外骨骼内部,适用于可穿戴外骨骼、手部辅助装置等场景。

其模块化设计还能灵活调校力量与速度——四台泵并联响应时间仅100毫秒,8个执行器成束组合可实现强大负重,单根16克的肌肉能举起4公斤重物,负重能力达自身250倍。

尽管未参与该研究,瑞士洛桑联邦理工学院教授Herbert Shea评价,这项工作在纤维形态软驱动领域取得重要进展,解决了便携性与功率密度的长期难题,且在基础流体动力学与实际机器人应用之间建立了有效连接,提供了完整的系统级解决方案。
该研究获得欧洲研究委员会及媒体实验室多方资助联盟支持,团队成员还包括巴里理工大学与麻省理工学院的多位科研人员。
需要注意的是,该技术目前仍有挑战,EHD泵效率仅为个位数百分比,高压电力电子元件的微型化仍是重点攻关方向。
同时,Afsar也强调,这种纤维肌肉并非要取代电机,而是拓展机器人设计空间,打造更具韧性、柔性的仿生系统。
02.
Clone,打造2万美元以内的“合成人类”
与MIT的学术探索相呼应,Clone Robotics正将类似的仿生肌肉技术推向产业化,其核心方向是打造“合成人类”而非传统人形机器人。
近期,Clone Robotics宣布从波兰转型进驻硅谷核心地带,在加利福尼亚州山景城开设第二家办公室,为技术规模化落地做准备。
Clone Robotics的技术路线与行业主流截然不同,摒弃了将电机塞进刚性外骨骼的模式,采用高度还原人体解剖结构的聚合物骨骼,驱动系统则是改良升级自麦基宾技术的“肌纤维”(Myofiber)人工肌肉,需一套复杂的微型化液压血管系统支撑运行,仅上半身就拥有164个活动关节,可实现媲美人类的活动幅度。


这种技术路线虽需通过高维控制维持仿生人姿态,但能构建抽象层,让视觉-语言-动作(VLA)模型等高阶神经网络可像操控电机驱动机器人一样运行仿生人,兼具人类级别的柔软度、速度与力量,近期搭载新型神经关节控制器的机械手演示,已充分展现其灵巧度。

在2026 Abundance Summit上,Clone Robotics公布了明确的发展路线图:
◎2026年末推出“手术级精准”躯干平台,可操作手术刀、电钻等复杂工具;
◎2027年实现自然类人行走步态;
◎2028年推出首款商用“机器人管家”产品,主攻酒店等场景,这使其直接与1X、Figure、特斯拉等企业展开竞争,但核心技术路线差异显著。
成本控制是Clone Robotics的核心优势,该公司通过“千米级量产”人工肌纤维,已将单台肌肉骨骼仿生人制造成本控制在2万美元以内,这一价位与低端电机驱动机型相当,却具备高端仿生能力,未来计划维持这一大众定价,同时推出高端旗舰机型。
Clone Robotics的CEO Dhanush Radhakrishnan随后在社交媒体“澄清”补充,尽管目前原型机已实现成本效益,但完整双足机型仍在研发中,目标2027年底前完成,目前仍有工程工作待推进。
截至目前,Clone 已累计融资 1700 万美元,新一轮 5000 万美元融资正在推进中。
在产品设计上,Clone Alpha 采用仿生结构,通过聚合物骨骼和专属肌纤维人工肌肉,完整复刻人体生理构造。

此前展会现场展出的两代躯干机型,一台为深色仿真表皮搭配镜面面罩,另一台采用透明外壳,内部密集的白色人工肌肉清晰可见。
为应对恐怖谷效应,目前机型采用镜面面罩而非人脸设计,未来计划迭代至Neoclone,并搭载中性面部,最终打造“True Clones”终极克隆体,复刻全部40块面部肌肉以捕捉微表情,做到与真人难以区分。
值得一提的是,这种聚焦仿生与制造环节的思路,也契合Allonic等企业“编织式造机器人”的行业趋势。
NE时代智能体 ,赞198203.
写在最后
从MIT的电流体纤维肌肉实验室突破,到Clone Robotics的“合成人类”产业化探索,仿生人工肌肉技术正逐步打破传统电机驱动的局限,实现从技术原理到实际应用的跨越。
无论是学术领域对生物肌肉特性的精准复刻,还是产业领域对成本与场景的精准把控,都在推动机器人技术向更柔性、更坚韧、更贴近生物形态的方向发展,为可穿戴设备、人形机器人等领域的创新开辟了全新路径。












 沪公网安备31010702008139
沪公网安备31010702008139