
3月27日,工业和信息化部、科学技术部、财政部、中国民用航空局印发《通用航空装备创新应用实施方案(2024-2030年)》
其中提出,加快提升通用航空装备技术水平,提高通用航空装备可靠性、经济性及先进性。推进大中型固定翼飞机、高原型直升机,以及无人机等适航取证并投入运营,实现全域应急救援能力覆盖。支持加快支线物流、末端配送无人机研制生产并投入运营。
支持智慧空中出行(SAM)装备发展,推进电动垂直起降航空器(eVTOL)等一批新型消费通用航空装备适航取证。
鼓励飞行汽车技术研发、产品验证及商业化应用场景探索。针对农林作业、工业生产等应用需求,不断提升产品竞争力和市场适应性。
随着电池技术的进步和电动航空领域的快速发展,飞行汽车也在逐渐成为一大趋势。高能量密度电池、高效电驱动系统、快速充电技术的不断突破也将提升飞行汽车的续航能力和使用便利性。
目前飞行汽车产业正处于技术突破、市场蓄势待发、政策积极引导的快速发展阶段。本次笔者就飞行汽车的技术要求、产品结构、如何供电等方面来聊一聊不足之处还望大家指正。
飞行汽车是什么
飞行汽车,又名空中汽车或陆空两用车,是一种创新的跨界交通工具,它融合了传统汽车和飞机两种运输工具的功能,当然这是最初的理解,目前来看其本质还是一种电动垂直起降航空器,未来使用场景谁都没法定义,但是会接近于我们对汽车的定义。

这种交通工具的目的是通过技术创新打破传统的二维地面交通限制,实现三维空间内的高效、灵活出行。为日益严重的地面交通拥堵问题,提供更为灵活高效的出行方案,特别是在城市间的快速移动和紧急救援等领域有着潜在的应用价值。
飞行汽车是对传统交通方式的一种革命性颠覆,然而,要真正实现飞行汽车的广泛应用,还需要在技术、法规、社会接受度等多个维度上取得重大突破。
目前的飞行汽车分为分体式飞行汽车和一体式飞行汽车。
分体式飞行汽车是将飞行器与地面行驶汽车进行了模块化设计,使其能够独立运作又能相互结合。

由两大部分构成,一是专门用于地面行驶的陆行体,通常拥有完整的汽车结构,包括底盘、车轮、驱动系统等;二是可分离的飞行模块,具备垂直起降(VTOL)能力和空中飞行所需的螺旋桨、电机、涵道风扇等飞行组件。
◎在技术层面,分体式飞行汽车采用了先进的航空与汽车工程技术,如自动共享底盘、增程式电力系统、后轮转向功能、6轴6桨构型、可反转涵道等高科技配置,确保了其在地面和空中的稳定性和安全性。
一体式的飞行汽车是一种融合了汽车和飞机特性的交通工具,它的设计目标是无需拆卸或更换任何主要部件即可在道路上行驶和空中飞行。
这种飞行汽车的设计理念是将飞行器的翅膀、推进系统和控制系统整合入汽车结构中,使其能够在不改变自身形态的情况下完成陆地和空中模式的切换。

一体式飞行汽车的关键特征是可折叠或可伸缩的飞行组件,为了便于在道路上行驶,飞行汽车的翅膀、螺旋桨或涵道风扇等飞行元件通常采用可折叠或可伸缩设计,降落后能够迅速收纳至车身内,不影响路面行驶。
为了满足陆空两种模式的运行需求,一体式飞行汽车通常采用电动或混动动力系统,既可以为汽车轮胎提供驱动力,也能为飞行组件提供升力和推进力。
◎在技术层面,一体式飞行汽车的挑战不小,需要集合汽车工程、航空工程、材料科学、信息技术等多个领域的尖端技术,目前来看商业化落地很难。
飞行汽车结构
一体式飞行汽车车体的结构的设计比较复杂,既要满足机翼的安装,又要满足汽车底盘、门槛梁、顶盖总成等系统部件安装和连接,既需要满足飞行工况各种载荷,也要满足陆行工况下的各种载荷要求。

要能在地面道路上作为常规车辆行驶,当需要飞行时,通过伸展或转换其飞行组件(如旋翼、涵道风扇或固定翼),切换到空中飞行模式。目前来看一体式飞行汽车还是有不小的难关要攻克的,具体结构我们暂表不谈。
分体式飞行汽车的结构,上述我们也有讲过分体式飞行汽车有飞行模块和陆行模块,除了这两个模块外,还需要有共享组件和系统以及组合与分离机制。

◎陆行模块的主要功能其实是充当飞行模块的运输工具和充电站,另外还要设置专用的机械或电子接口,用于与飞行模块对接,实现两部分的物理连接与数据通信。
◎飞行模块的结构大致包括机翼、尾翼、机身骨架等结构,设计要符合空气动力学要求,提供飞行时的升力、稳定性和操纵性。
◎还有起落架用于起飞、降落时支撑飞行器,通常设计为可收放式,以减小飞行时的阻力。
◎飞行控制系统也是不可缺少的,包括飞行计算机、自动驾驶仪、传感器(如GPS、气压计、陀螺仪、磁力计等),实现飞行姿态控制、导航与自动驾驶功能。
◎最关键的当属动力推进系统了,可以是螺旋桨、涵道风扇、电动或燃油发动机等,为飞行提供推力。电动飞行汽车可能配备多个电动机和旋翼,实现垂直起降(VTOL)能力。
这里就不得不提现在大火的电动垂直起降飞行器(eVTOL)。大部分分体式飞行汽车的飞行模块都是用的eVTOL。因为eVTOL的设计理念与分体式飞行汽车的需求十分契合(垂直起降、较小的起降场地需求、操作简便性等),所以飞行模块中常常采用eVTOL技术。

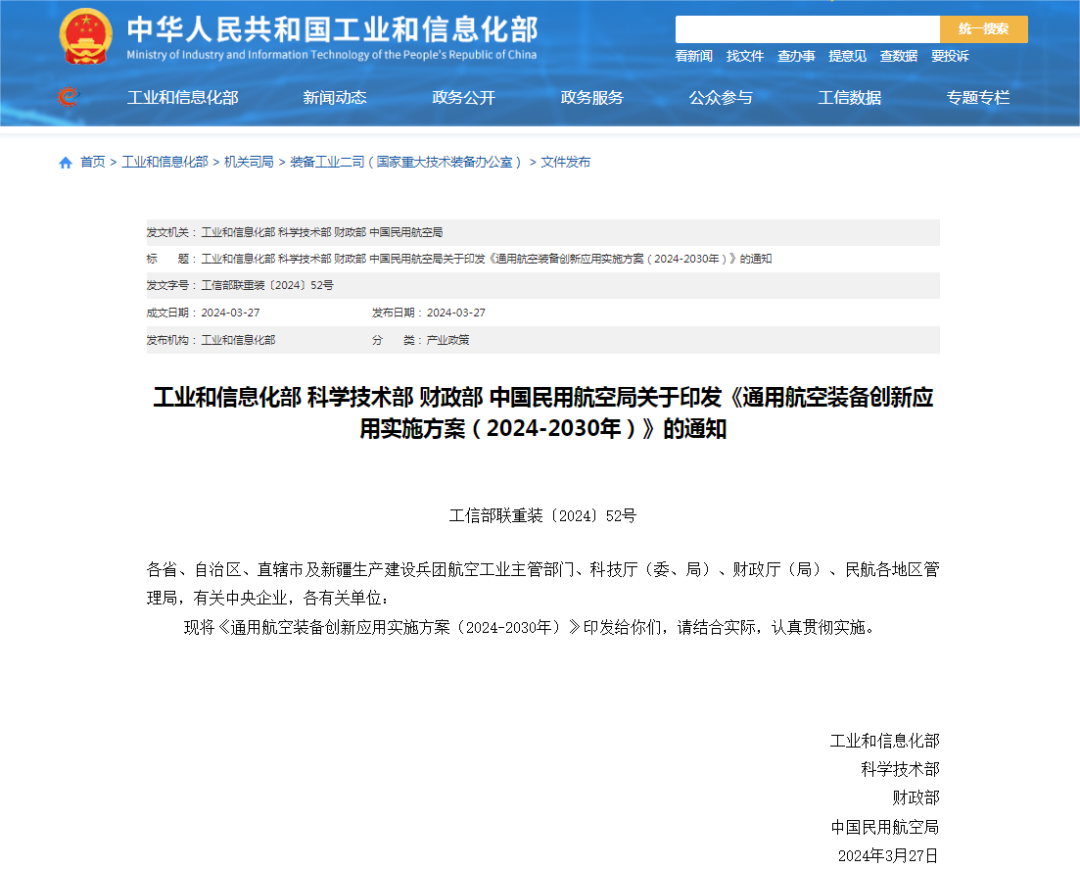
eVTOL飞行器完全依赖电力驱动,通常配备多组电动机和旋翼或风扇、涵道,这些旋翼可以是分布式设计如多旋翼无人机式布局或集中式设计如倾转旋翼、涵道风扇,用于提供垂直起降和悬停所需的升力,以及平飞时的前进推力。
与传统固定翼飞机需要跑道滑行起降不同,eVTOL飞行器能够实现原地垂直起降,大大减少了对机场设施的依赖,适用于城市中心、楼顶停机坪、小型开放场地等多元环境。
部分eVTOL设计允许旋翼在飞行过程中进行角度调整,从垂直起降模式转变为水平飞行模式,实现高效巡航。这种转换可以是机械倾转(如倾转旋翼机)、涵道推力矢量调整(如贝尔Nexus)或旋翼折叠/收回(如分布式电动推进系统的固定翼转换)等方式。

这里简要的说明一下分布式推进和可变倾转机构。
◎分布式推进:即多个小型推进装置分布在机体的不同位置,如机翼端部、机身四周的机臂上。这种布局有利于实现精确控制、冗余安全性和降低噪音。
◎可变倾转机构:部分eVTOL的推进装置(如涵道风扇或螺旋桨)能够进行倾转,使得在起飞和降落时产生垂直向上的升力,而在巡航飞行时转变为水平推力,实现固定翼飞行模式,从而提高航程效率。
eVTOL用什么电机
eVTOL的电机通常是定制设计的,而不是直接使用现有的工业或车用电机。这是因为eVTOL电机必须在不同的工作点(包括起飞、巡航和降落)都表现出色,而且要在有限的空间内集成到航空器的设计中。

所以用什么电机要看它需要什么,eVTOL作为飞行汽车的航空器需要具备什么,这要从实际应用端来看了。
◎首先eVTOL需要电机具备高效率,以减少能源消耗并最大化电池的效能。
◎高功率密度也少不了,功率密度是指电机提供的功率与体积或重量的比例,eVTOL电机需要有高功率密度,以在有限的空间和重量要求下,提供足够的推力。
◎还要有较宽的调速范围,eVTOL在起降、悬停、过渡飞行和巡航阶段需要不同的转速。电机应具备宽广的调速范围,能够在低速时提供高扭矩(如垂直起降时),同时在高速时保持高效(如巡航飞行时)。
◎由于安全考虑,eVTOL电机需要在严苛的飞行条件下保持高水平的可靠性和耐久性,需要设计电机冗余。即使单个电机故障,其他电机仍能保证必要的飞行控制和安全着陆。
◎强大的推力产生时还会伴随着大量热量,所以eVTOL电机的散热设计必须能够高效地导出热量,以防止过热和损害电机。
◎低噪音也是必不可少的,城市空中交通对噪音非常敏感,因此eVTOL电机的设计需要尽可能减少噪音,这通常涉及特殊的电机设计和声学优化。
◎永磁同步电机(PM):因其具有高功率密度、高效率、良好的动态响应和可控性,利用永磁体产生恒定磁场,配合三相交流电驱动,能够精确控制电机转速和扭矩,这对于需要精确控制旋翼或涵道风扇倾转角度的eVTOL至关重要。
◎开关磁阻电机(SRM)没有永磁体,而是依靠定子和转子齿槽间的磁阻变化产生扭矩。SRM具有结构简单、成本较低、耐高温、高转矩密度等优点。
然而,其缺点不少包括非线性动力学特性、较大的噪声和振动、需要复杂的控制策略等。未来随着控制技术进步,SRM的这些不足可能得到改善,使其成为eVTOL的一种备选电机类型。
◎无刷直流电机(BLDC)虽不如PM常见于eVTOL,但其结构简单、控制相对容易、效率较高,且具有良好的转矩特性。BLDC适用于需要快速响应和精确控制的应用场合。
然而,其功率密度和效率一般低于PMSM,且需要复杂的换向电路。在某些特定的eVTOL设计中,如果对成本、控制复杂度或特定性能特性有特定需求,BLDC可能是合适的选择。
◎感应电机(IM)结构坚固、成本低廉、维护简单,常用于工业应用。在eVTOL领域,感应电机也可能用于某些特定场景,如辅助动力系统或地面支持设备。
然而,其效率和功率密度通常较低,且需要复杂的矢量控制才能实现宽范围调速。随着控制技术和材料科学的发展,高性能的感应电机也有可能在特定eVTOL应用中得到考虑。
◎同步磁阻电机(SynRM)是结合了永磁电机和开关磁阻电机的优点,具有高效率、高功率密度、低噪音和振动等特点。SynRM不需要昂贵的永磁材料,降低了成本和资源依赖。
然而,其控制复杂度相对较高,且在某些工况下效率可能低于PM。随着控制技术的进一步成熟,SynRM有可能成为eVTOL的一种有竞争力的电机选项。
随着技术进步,一些新兴电机技术如超导电机、磁流体电机、线性电机等也可能在未来被研究用于eVTOL。这些电机可能带来更高的效率、功率密度、或者独特的运行方式,但目前技术成熟度、成本、基础设施支持等因素限制了其在eVTOL领域的应用。
飞行汽车怎么供电
目前,大多数现代飞行汽车原型和正在研发的产品多数是采用锂电池作为主要动力源,例如使用锂离子电池或锂聚合物电池,它们提供了足够的能量密度以支持短程飞行。
这类飞行汽车通常有专为飞行优化设计的高容量电池组,比如很早之前雷诺的AIR4飞行汽车就是搭载22000mAh的锂聚合物电池。
当然还有某些飞行汽车也在探索使用氢燃料电池技术,通过氢气与氧气反应生成电能,排放物仅为水,不仅环保而且续航能力更强。
这类飞行汽车往往更轻,因为氢燃料电池的能量密度理论上高于锂电池,且补能速度快。
这里我们主要还是看分体式飞行汽车,分体式飞行汽车的飞行体包括飞行动力系统,陆行体包括陆行动力系统,
因此涉及到飞行汽车的飞行体和陆行体的供电问题。如何有效利用其陆行体电池包、飞行体电池包以及可能存在的增程器(如燃油发电机)等能量源,进行合理、高效的供电。
这里我们可以看看汇天航空航天的供电策略,当飞行汽车由陆行体电池包提供初始动力,且该初始动力能满足目标功率需求时,系统通过电流变换器(DC-DC转换器)将陆行侧多余的能量传递给飞行侧的设备,例如飞行体电池包进行充电或直接供应给飞行负载。
若陆行体电池包提供的初始动力不足,增程器将介入提供额外的动力补充,当两者总和能满足目标功率时,同样通过电流变换器将电力分配给飞行侧。

在某些情况下,若陆行体电池包和增程器一起也无法满足全部目标功率,这就要设计飞行体电池包向陆行侧供电的机制,确保飞行汽车在地面行驶时也有充足的动力。

在不同功率需求情况下的供电决策过程,通过比较各个能量源的实际供给能力与目标需求,决定如何调配和转换能源。
此外汇天还有一套完整的飞行汽车供电系统,包括控制器、电流变换器、陆行体电池包和飞行体电池包,以及可能存在的增程器。
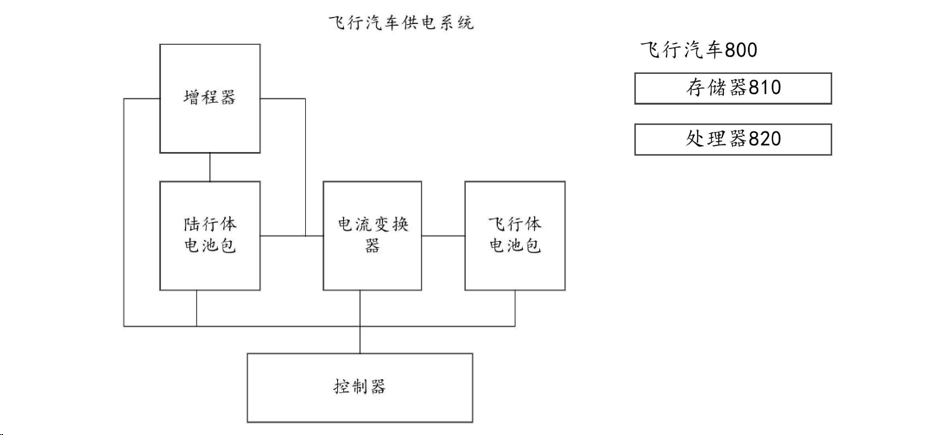
其中,控制器负责实时监测和控制整个供电过程,确保飞行汽车在陆地和空中都能获得合适且充足的能源供应。
供电方法的硬件和软件组成部分,包括含有相关可执行代码的存储器、处理器以及计算机可读存储介质,使得飞行汽车能够在运行过程中自动执行这套复杂的能量管理和供电策略。
End.
这么看的话,新能源电动车和eVTOL航空器在电机、电池、电控等方面是存在技术共性的。目前的电驱企业完全可以利用已有的新能源汽车电驱技术基础,进行技术迁移和升级,开发适应eVTOL特性的高性能电机。
根据不同类型的eVTOL(如载人、货运、应急救援、观光旅游等)对电机的不同需求,开发针对性的产品系列,满足多元化的市场需求。












 沪公网安备31010702008139
沪公网安备31010702008139